Iedereen heeft het wel eens gehoord of gezien: een kat landt altijd op zijn poten, of hij nu van de bank springt of van een veel grotere hoogte. Maar hoe kan dat eigenlijk? Hoe lukt het een kat om zichzelf in de lucht te draaien en altijd goed terecht te komen?
Om dat te begrijpen moeten we terug naar de basis van de mechanica: rigid body dynamics, de leer die beschrijft hoe starre lichamen bewegen en draaien. Wat houdt dat precies in? Waarom is het zo belangrijk, en waar kom je het allemaal tegen in de praktijk? En natuurlijk, hoe gebruikt een kat deze natuurwetten in zijn voordeel?
Wat is Rigid Body Dynamics (RBD)?
Rigid Body Dynamics is het onderdeel van de mechanica dat zich bezighoudt met het gedrag van starre lichamen; dat zijn objecten die niet vervormen onder invloed van krachten: alle onderdelen blijven steeds op dezelfde afstand van elkaar. Deze aanname maakt de analyse van bewegingen een stuk eenvoudiger, omdat er dan wordt gekeken naar de verplaatsing en de rotatie van het gehele object. In andere woorden: een complex object wordt tot een punt met een oriëntatie versimpeld. RBD beschrijft dus hoe zo’n ideaal, hard object zich beweegt onder invloed van krachten. Alles wat vervormt of vloeit, zoals vloeistoffen of elastisch materiaal, valt hierbuiten.

Onder de motorkap werkt TBD met de klassieke bewegingswetten van Newton. Kinematica (hoe beweegt iets?) wordt gecombineerd met kinetica (waarom beweegt iets?) om te berekenen waar elk deel van een systeem zich bevindt, hoe snel het beweegt en hoe dat in de tijd verandert. Denk aan de wetten van Newton (bijvoorbeeld F=m∙a) of momenten die rotatie beschrijven. Door die vergelijkingen op te lossen, kan worden voorspeld waar een object zich wanneer zal bevinden, en hoe snel het draait of beweegt. Rigid Body Dynamics is een onmisbaar hulpmiddel bij computersimulaties van mechanische systemen: als je wilt weten hoe een object door de lucht beweegt of hoe een machineonderdeel ronddraait, gebruik je de principes van Rigid Body Dynamics.
Waarom is RBD zo belangrijk in de mechanica?
Maar waarom is Rigid Body Dynamics zo belangrijk binnen de mechanica? Allereerst vormt het de basis van talloze toepassingen binnen de techniek. Door aan te nemen dat objecten niet vervormen, kunnen ingenieurs complexe bewegingen terugbrengen tot overzichtelijke berekeningen. Dat maakt het mogelijk om bijvoorbeeld voertuigen, machines en constructies veilig en efficiënt te ontwerpen.
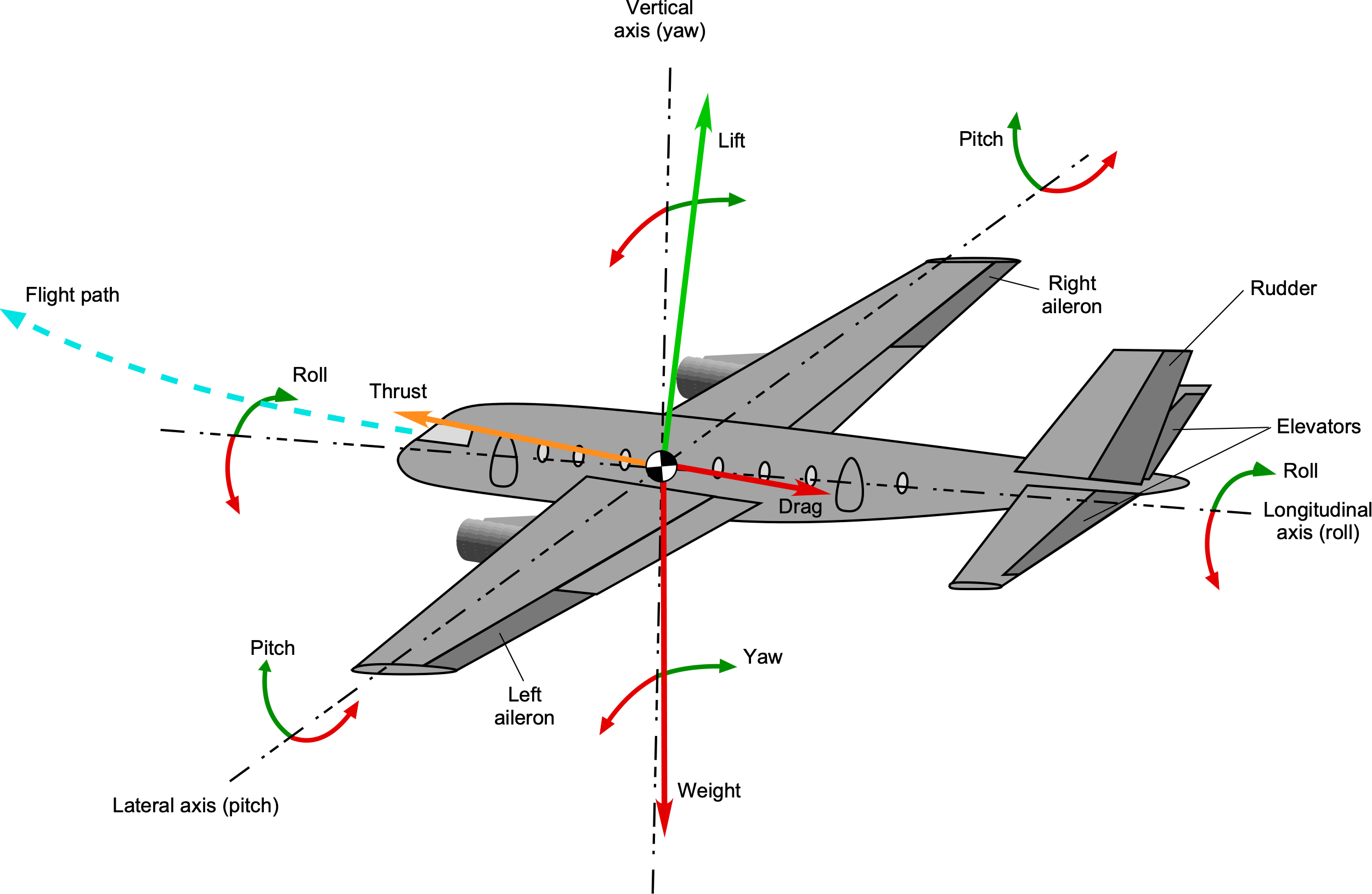
Een goed voorbeeld is een vliegtuig. Tijdens de ontwerpfase wil je weten hoe het reageert op luchtstromen, hoe het stabiel blijft en hoe het zich in de lucht oriënteert. Met de principes van Rigid Body Dynamics kun je precies dat gedrag voorspellen. Hetzelfde geldt voor auto’s, robots en satellieten. Zelfs de kleinste onderdelen, zoals een scharnier of een tandwiel, worden met deze kennis ontworpen om soepel te bewegen en krachten goed te verdelen.
Daarnaast is RBD erg belangrijk bij het ontwerpen van machines en mechanische systemen. Van motoren tot windturbines: overal waar rotatie wordt omgezet in lineaire beweging, of andersom, komen de vergelijkingen van RBD van pas. Ook in robotica en animatie is het onmisbaar. Robots bewegen hun armen alsof het starre segmenten zijn, en animatiefilms of videogames gebruiken principes gebaseerd op RBD om objecten realistisch te laten vallen, stuiteren of botsen.
Zelfs in de medische wereld en de sport komt deze kennis goed van pas. Biomechanici modelleren het menselijk lichaam als een verzameling van starre segmenten (zoals botten) om beter te begrijpen hoe we bewegen, om zo protheses te ontwerpen die natuurlijk aanvoelen. Door de krachten en bewegingen in gewrichten te analyseren, kun je bijvoorbeeld berekenen hoe een knieprothese precies moet draaien om comfortabel te functioneren. Maar het kan ook helpen voor atleten om hun techniek te verbeteren en blessures te voorkomen.
Tot slot verklaart Rigid Body Dynamics ook allerlei alledaagse verschijnselen en speeltjes. Heb je je ooit afgevraagd hoe een tol zo stabiel blijft draaien, of waarom een boemerang terugkeert? Die bewegingen zijn volledig te begrijpen met de eigenschappen van starre lichamen. Zelfs een draaiende frisbee of de mysterieuze rattleback dat alleen één kant op wil draaien, is pure RBD in actie. Zonder dit vakgebied zouden ingenieurs en wetenschappers behoorlijk in het duister tasten over hoe objecten bewegen.
De vallende kat – is het wel rigid body dynamics?
Tijd om terug te keren naar de vraag uit de introductie: waarom komt een kat (bijna) altijd op zijn pootjes terecht?
Inmiddels weten we wat Rigid Body Dynamics inhoudt, maar ironisch genoeg is het juist het gebrek aan rigiditeit dat de kat helpt te landen. In plaats van zich te gedragen als één star lichaam, gebruikt hij zijn flexibiliteit en beweegt hij als een systeem van meerdere starre segmenten: multi body dynamics.
Het beroemde falling cat problem houdt wetenschappers al meer dan een eeuw bezig. In de 19e eeuw probeerden natuurkundigen, onder wie James Clerk Maxwell, te begrijpen hoe katten dit voor elkaar kregen. Op foto’s uit 1894 (zie de afbeelding hieronder) was te zien dat een kat die ondersteboven begint te vallen, zich in de lucht omdraait en netjes op zijn poten landt. Volgens de wet van behoud van impulsmoment zou dat onmogelijk moeten zijn: zonder extern koppel kan een lichaam niet zomaar gaan draaien. Toch doet de kat het, en dat bleef lang een raadsel.

De oplossing kwam in 1969, toen fysici beseften dat een kat geen enkel star lichaam is, maar een samenstelling van meerdere segmenten, een levend voorbeeld van multi body dynamics. Terwijl het totale impulsmoment nul blijft, kan de kat zijn voor- en achterlijf onafhankelijk van elkaar bewegen. Het ene deel draait de ene kant op, het andere juist de andere kant op, en zo verandert zijn oriëntatie zonder dat de natuurwetten worden geschonden.
Daar komt nog een slim trucje bij kijken. Zodra de kat merkt dat hij valt, trekt hij zijn voorpoten in en maakt hij zijn romp compact. Daardoor wordt het traagheidsmoment aan de voorkant kleiner, waardoor dat deel sneller kan draaien. Tegelijk strekt hij zijn achterpoten, zodat dat deel langzamer draait in tegengestelde richting. Vervolgens wisselt hij dit om: de voorzijde strekt zich weer, de achterzijde krult in, en zo draait hij stukje bij beetje bij tot alle vier de poten onder zijn lijf staan.
Wat eruitziet als pure kattengymnastiek is in werkelijkheid een prachtige demonstratie van multi body dynamics. De kat gebruikt de wetten van de mechanica niet tegen, maar juist met zichzelf. Zonder externe krachten, enkel met slim gebruik van zijn eigen lichaamsdelen, zorgt hij ervoor dat hij altijd goed terechtkomt. De volgende keer dat je een vallende kat ziet kun je dus bij jezelf denken: dit multi body dynamics probleem lost zichzelf wel op.
Wat voor mij begon als een simpele nieuwsgierigheid tijdens het bachelorvak Rigid Body Dynamics, bleek al snel een stuk complexer dan gedacht. De natuurkunde achter iets dat zo eenvoudig lijkt als een vallende kat is veel complexer dan ik had verwacht. Om katten (en hun natuurkunde) écht te begrijpen, zal ik eerst de master in moeten duiken. Wie weet volgt er dan nog een blog, met nóg meer kattendynamica.
Robert Dilber
Bronnen
- T. R. Kane & M. P. Scher – “A dynamical explanation fo the falling cat phenomenon”
- WB2630 Rigid Body Dynamics – Opgedane kennis
- WB2630 Rigid Body Dynamics, Arno Stienen – Afbeelding Tol
- Eagle Pubs – Afbeelding Rigid Body Dynamics Vliegtuig
- Wikipedia – Falling Cat Problem afbeelding
{kind=link}
{kind=link}