Bijna iedereen die wel eens door de Mechanical Engineering-faculteit van de TU Delft is gelopen, heeft hem gezien: de Toyota Prius volgeplakt met sensoren, camera’s, radar en zelfs een paar microfoons. Geen kunstproject, maar een rijdend lab van de Intelligent Vehicles-onderzoeksgroep. In onze vorige blog over autonoom vervoer concludeerden we dat volledig zelfrijdende auto’s (SAE-niveau 5) voorlopig nog geen realiteit zijn. Nederland experimenteert al wel met niveau 4, denk aan de zelfrijdende bus in Rotterdam, maar er zijn nog flink wat obstakels. Het goede nieuws? Er wordt heel hard gewerkt aan de ontwikkeling van autonome voertuigen. TU Delft liet onlangs zien hoe zij bouwen aan die toekomst: van slimme fietsen tot robotauto’s.

Kan een auto op afstand bestuurd worden?
Een interessante tussenstap naar volledige autonomie is tele-besturing: auto’s die op afstand bestuurd kunnen worden. TU Delft onderzoeker Georgios Papaioannou doet onderzoek naar of een chauffeur op afstand een auto kan besturen, net alsof hij echt achter het stuur zit. Met behulp van meerdere cameras, een platform dat bewegingen nabootst en een razendsnelle 5G-verbinding krijgt de bestuurder alle input binnen alsof hij in de auto zit. Dankzij de 5G-verbinding moet de vertraging minimaal zijn, en dat is maar goed ook; een vertraging van een halve seconde kan namelijk al enorme gevolgen hebben. In Estland zijn al tests gedaan met tele-chauffeurs, waar bleek dat vrijwel latency-vrij op afstand rijden mogelijk is.
Het idee is dat zo’n tele-chauffeur in de toekomst kan ingrijpen of zelfs meerdere voertuigen kan monitoren op momenten dat de AI het lastig vindt. Voorlopig staat dit concept echter nog in de kinderschoenen, maar de eerste resultaten zijn veelbelovend.

Kunnen fietsen en auto’s met elkaar praten?
Naast slimme auto’s ontwikkelt TU Delft ook een slimme fiets: de SenseBike. Dit is een zelfstabiliserende fiets die is uitgerust met dezelfde sensoren als autonome auto’s, zoals camera’s en LiDAR. Hierdoor kan de fiets zijn omgeving “zien”, met als gevolg dat auto’s en fietsen dan met elkaar kunnen communiceren. De fiets “weet” namelijk dat er een auto aankomt, en de auto weet dat er een fiets nadert. In een land vol fietsers als Nederland is dat cruciaal om ongelukken te voorkomen. Door de overvloed aan fietsen in Nederland, is het de perfect plek om veel data te verzamelen over fietsers en hun gedrag; de Delftse onderzoekers hebben bijvoorbeeld de hele stad Delft doorgefietst om data te verzamelen en de omgeving in kaart te brengen. Die gegevens helpen op hun beurt weer bij het slimmer maken van AI-systemen in hun omgang met fietsers. Hoewel het concept nog in de startblokken staat, laat het wel zien hoe je met technologie juist ook kwetsbare verkeersdeelnemers kunt beschermen.

Wat doen we tegen wagenziekte?
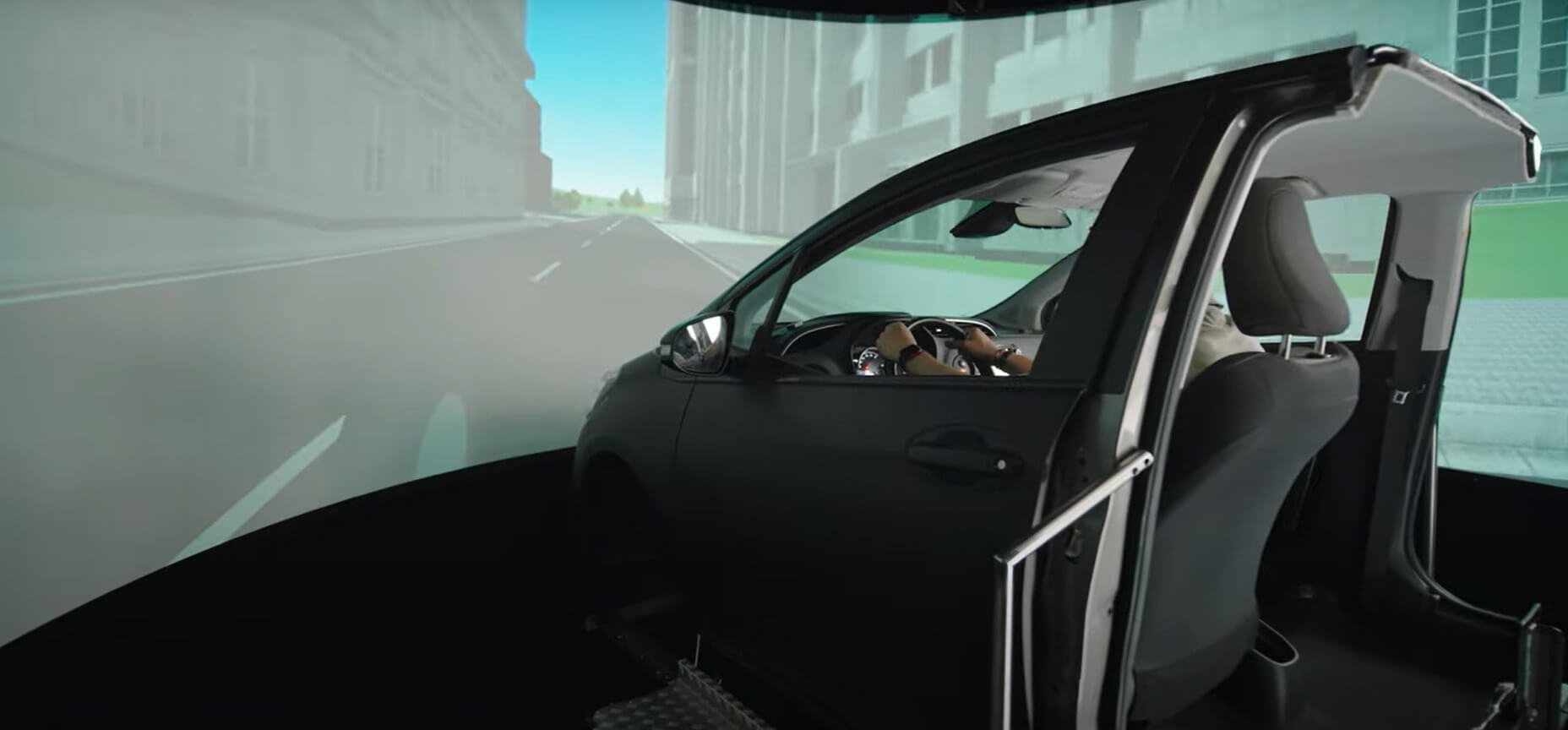
Misselijkheid in de auto is iets waar iedereen wellicht ervaring mee heeft: twee op de drie mensen heeft hier last van. Een boek lezen of op je telefoon zitten is hierdoor niet mogelijk, terwijl een zelfrijdende auto hier júíst de mogelijkheid voor geeft. Barys Shyrokau, ook een onderzoeker aan de TU Delft, zoekt naar manieren om dat tegen te gaan. In een simulator (de voorste helft van een auto op een bewegingsplatform) wordt getest hoe je met ander rijgedrag de ervaring comfortabeler kunt maken. Het idee is dat de autonome auto meer rust biedt dan een niet-autonome auto, door rustiger te accelereren, vloeiender te remmen en bochten minder abrupt te nemen. Hopelijk leidt dit tot minder misselijkheid. De onderzoekers hoepen binnen vijf jaar met een oplossing voor dit probleem te komen, zodat je straks met een geruste maag in een robottaxi kunt zitten.

Gaan vrachtwagens in colonne rijden?
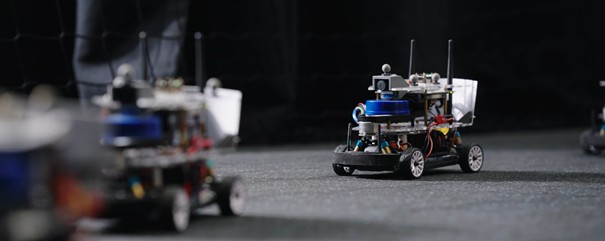
In onze vorige blog benoemden we al kort het idee van vrachtwagens die in formatie rijden, om zo brandstof te besparen en verkeersdrukte te verminderen: platooning. Platooning wordt nu ook daadwerkelijk door TU Delft onderzocht; in een gecontroleerde omgeving laat assistent-professor Laura Ferranti met zijn team kleine autonome truckjes dicht achter elkaar rijden als een treintje. Elke mini-vrachtwagen is uitgerust met eigen LiDAR en sensoren, en via de cloud “praten” ze continu met elkaar. Als het voorste voertuig remt, remmen de andere voertuigen direct mee. Zo’n kolonne moet natuurlijk veilig functioneren. Juist daarom besteden de onderzoekers veel aandacht aan cyberveiligheid en robuuste communicatie tussen de wagens. Één gehackt of haperend vrachtwagentje mag immers niet de hele stoet in de war brengen. Als deze tests slagen, brengt dat platooning op de snelweg weer een stap dichterbij. In de toekomst zien we misschien vrachtwagens die strak in lijn over de A16 zoeven, met minimale tussenruimte.
Zo test TU Delft rijgedrag van mensen én robots
De TU Delft onderzoekt niet alleen hoe voertuigen autonoom kunnen rijden, maar ook hoe mensen daarop reageren. Assistent-professor Arkady Zgonnikov kijkt of autonome voertuigen net zulke goede chauffeurs zijn als mensen, wat niet alleen belangrijk is voor de makers, maar ook voor gebruikers én wetgevers. Want echt duidelijke regelgeving is er nog amper…
Samen met bedrijven ontwikkelde Zgonnikov een wiskundig model voor menselijk rijgedrag. Hiermee kan goed voorspeld worden hoe het verkeer “stroomt”, maar dit geeft nog niet het hele plaatjes. Minstens zo belangrijk is namelijk e andere weggebruikers reageren op die robotauto’s. Omdat je met veel van deze voertuigen nog niet zomaar de weg op mag, gebruikt het team VR-simulaties om gedrag te testen.
In zo’n simulatie nemen proefpersonen plaats achter een virtueel stuur. Ze krijgen een 3D-bril op, sturen en remmen zelf, en moeten bijvoorbeeld invoegen. Daarbij vertonen ze verrassend realistisch gedrag: over hun schouder kijken, inschatten of het kan. Zulke experimenten helpen om beter te begrijpen hoe zelfrijdende auto’s zich moeten gedragen in een wereld vol mensen, én hoe we stap voor stap toewerken naar acceptatie in het dagelijks verkeer.
Loopt Europa achterop?
De techniek voor autonoom rijden wordt steeds beter, maar de grootste uitdaging is en blijft het opschalen. Zoals we in onze vorige blog al aanstipten, loopt Europa daar nog flink in achter. Dat benadrukt ook TU Delft-onderzoeker Dariu Gavrila. In Amerika en China steken overheden en techbedrijven samen miljarden in grootschalige pilots. In Europa zijn we voor dit soort projecten vaak afhankelijk van beperkte subsidies. En dat merk je.
Onze infrastructuur is bovendien een stuk gevarieerder. Een zelfrijdende auto die zich moeiteloos door een wijk in Californië navigeert, kan zomaar vastlopen op een Amsterdams grachtje. Autonome systemen moeten dus getraind worden op lokale omstandigheden, en dat vereist data.
En daar zitten de lastigheden. Want in Europa is er nog geen centrale aanpak voor het verzamelen en delen van die data. Data die in Nederland goed werkt, is niet per se bruikbaar in Spanje of Kroatië. De TU Delft pleit daarom voor meer lokale pilots, betere Europese samenwerking en vooral ook meer investeringen. Zolang het trainen van autonome systemen wordt overgelaten aan Amerikaanse of Chinese datasets, blijven we afhankelijk van buitenlandse technologie.
Tot slot
De voorbeelden van TU Delft laten goed zien dat autonoom vervoer meer is dan alleen techniek. Het gaat om hoe voertuigen zich gedragen, hoe mensen daarop reageren, en of de systemen zich aanpassen aan de wereld om hen heen. Van een slimme fiets tot een vrachtwagen in colonne: elke innovatie is een stap richting een toekomst waarin we ons anders gaan verplaatsen.
Maar om daar echt te komen, moeten we in Europa wel in beweging komen. Zolang we achterlopen op het gebied van data, regelgeving en investeringen, blijven we afhankelijk van technologie uit andere delen van de wereld. Terwijl we juist hier, met onze infrastructuur, kennis en complexiteit, enorm veel te bieden hebben.
Robert Dilber
Bronnen:
- Technisch Weekblad – Afbeelding TU Delft Toyota Prius
- Futurity – Afbeelding Teledriving
- YouTUbe TU Delft – Screenshot Sensebike @0:23
- YouTube TU Delft – Screenshot Platooning @0:05
- Technisch Weekblad – Afbeelding TU Delft Motion Sickness Simulator
- Technisch Weekblad – Van slimme fiets tot robotauto: zo werkt TU Delft aan de toekomst van autonoom vervoer
- TU Delft – Stad vol beweging
{kind=link}
{kind=link}
{kind=link}